Wir freuen uns, dass ein Paper, an dem wir unterstützend mitgewirkt haben, auf der International Conference on Robotics and Automation 2026 in Wien vorgestellt wird.
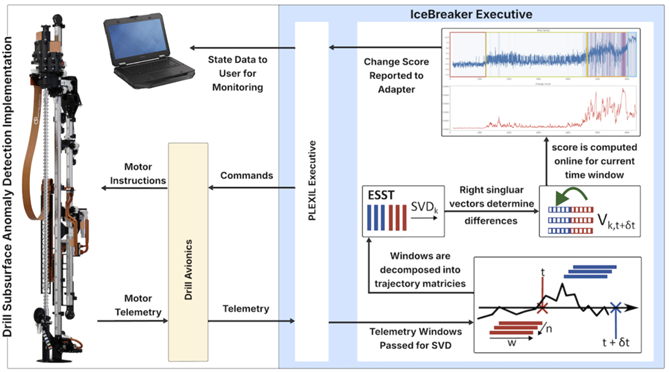
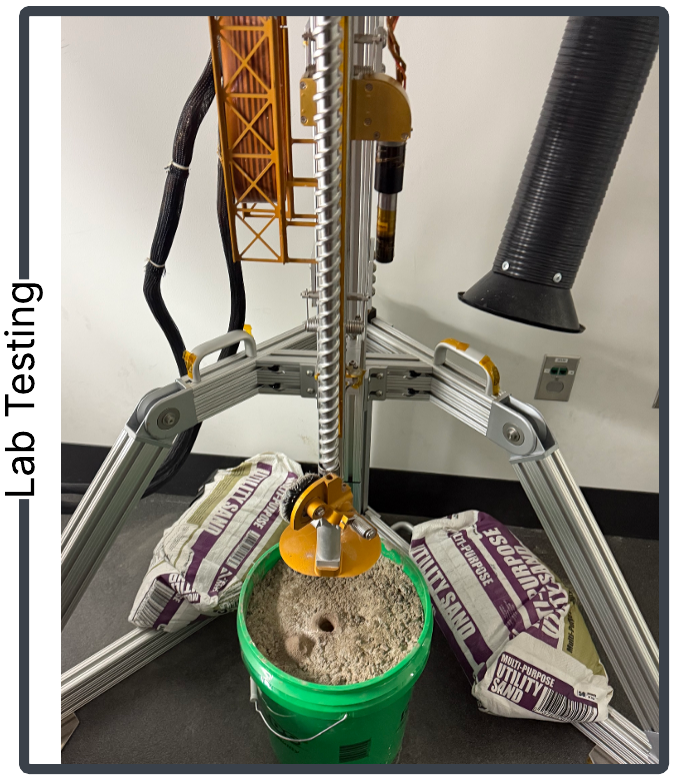
Der Artikel „Model-Free Subsurface Anomaly Detection using Subspace Analysis Techniques for Sparse Telemetry for Extraterrestrial Drilling Robots” stellt einen online-fähigen, trainingsfreien Ansatz zur Erkennung von Bohrfehlern und Anomalien für interplanetare Bohrroboter vor. Diese Fehler müssen trotz herausfordernder Rahmenbedingungen wie begrenzter Telemetriedaten und Rechenkapazität frühzeitig erkannt werden, um Beschädigungen am Roboter zu vermeiden.
Unser Beitrag konzentriert sich auf die ESST-Methode zur Erkennung plötzlicher Signaländerungen. Die Methode extrahiert Signalcharakteristiken mittels Matrixzerlegungen, um plötzliche Veränderungen zuverlässig zu erkennen, die im Anwendungsfall häufig von starkem Rauschen überdeckt werden. Der Beitrag ist eine Erweiterung unserer vorherigen Veröffentlichung: „Fault Prediction in Planetary Drilling Using Subspace Analysis Techniques”.
Diese weitere Veröffentlichung zeigt, dass Methoden zur Erkennung von Signaländerungen, die an unserem Lehrstuhl in einem Projekt zur Strukturierung und Integration von Zeitreihen entwickelt wurden, auf andere sehr interessante Anwendungen übertragen werden können.
Wir freuen uns, dass unsere Ergebnisse auch außerhalb ihrer ursprünglichen Intention auf Interesse stoßen. Wir gratulieren unseren Kooperationspartnern an der University of Minnesota und der NASA zu ihrer erfolgreichen Veröffentlichung.
 1/4
1/4 2/4
2/4 3/4
3/4 4/4
4/4