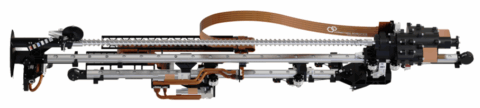
Manchmal sind die Verbindungen zwischen verschiedensten Themengebieten kürzer als man denkt. Deshalb ist es für uns eine besondere Freude, dass unsere Forschungsergebnisse aus dem Projekt DARTS nun auch im Bereich der planetaren Robotik (NASA TRIDENT Drill) interdisziplinäre Anwendung finden.
Ergebnisse zu entwickeln, die auch außerhalb des eigenen Anwendungsfeldes gewinnbringend eingesetzt werden können, ist für uns sehr motivierend.
Über eine für DARTS entwickelte Changepoint-Detection-Methode (ESST) ergab sich für uns die Möglichkeit, mit Sarah Boelter (University of Minnesota – Twin Cities), Prof. Dr. Maria Gini (University of Minnesota – Twin Cities) und Brian Glass von der NASA zusammenzuarbeiten.
Im Paper („Fault Prediction in Planetary Drilling Using Subspace Analysis Techniques“) stellen wir die Methode (ESST) auf Basis der SST vor und zeigen, wie sie zu den Anforderungen planetarer Robotik passt und andere Methoden bei der Erkennung von Bohrfehlern übertrifft. Das Paper, an dem wir in geteilter Erst-Autorenschaft mitgearbeitet haben, wird Anfang Juli 2025 auf der Intelligent Autonomous System 19 Konferenz in Genua vorgestellt.
Für die Initiative und die gute Zusammenarbeit möchten wir uns an dieser Stelle bei allen Ko-Autoren ausdrücklich bedanken!
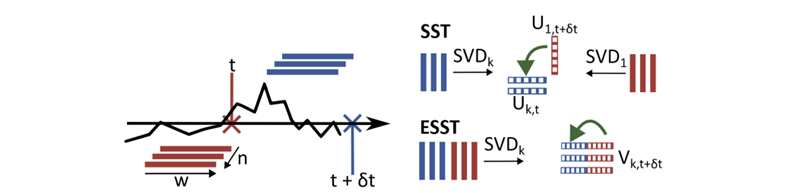
Fig.: Visualization of the difference between SST and ESST. The score computation is in green.
In unserem ursprünglichen Projekt verwenden wir die ESST, um Änderungen in Zeitreihen zu erkennen. Über die Hypothese, dass sich verknüpfte Systeme in komplexen industriellen Anlagen gleichzeitig verändern, können so verknüpfte Zeitreihen erkannt werden.
Die Methode ist in unserem Open-Source-Paket Changepoynt und auf PyPi veröffentlicht. Wir laden jeden herzlich dazu ein, die Methoden zu testen.
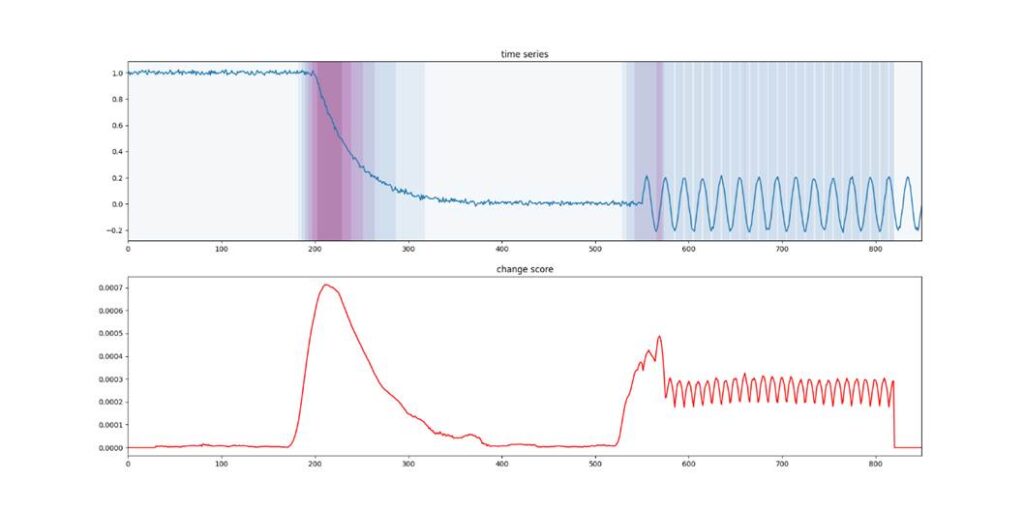
Fig.: Example for Change Point Detection using the Changepoynt Package
Abstract
In remote planetary environments, robotic agents must respond to or reason through faults before they escalate to mission-critical failures. No broadly applicable solution exists to give a specialized agent like The Regolith and Ice Drill for Exploring New Terrain (TRIDENT) situational awareness for when a situation may escalate to a drilling fault. We propose a new online time-series subspace analysis method, Enhanced Singular Spectrum Transformation (ESST), to better predict and analyze faults using online data produced by the TRIDENT drill. We evaluate performance against other online subspace analysis techniques to determine the optimal detection method for sudden drilling faults.
